
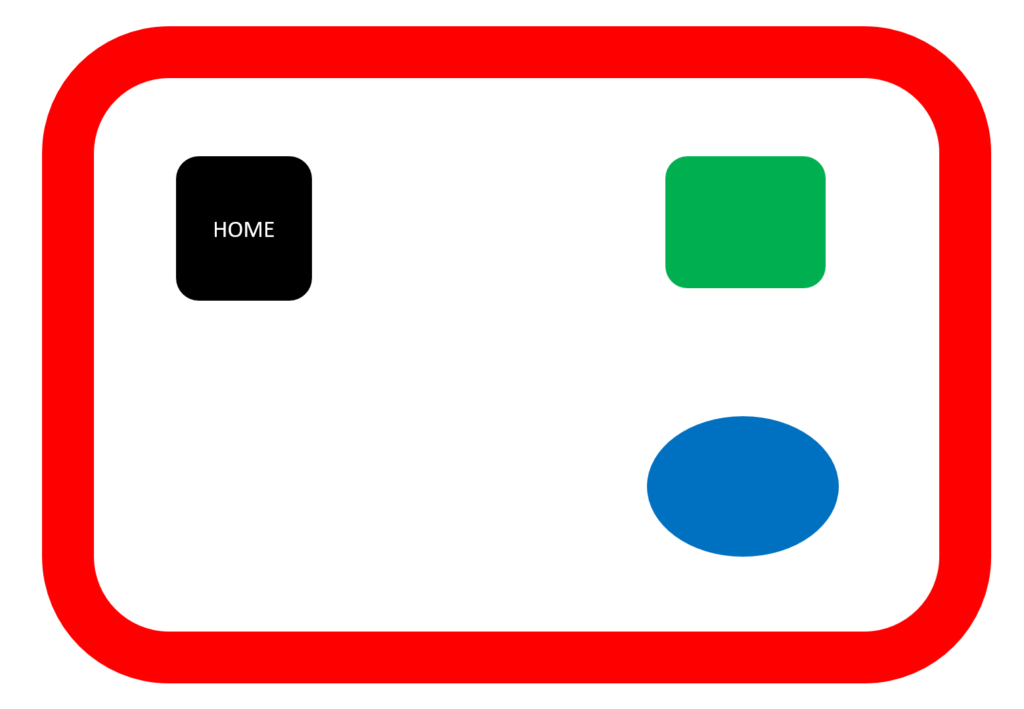
Ozobot nyní bude simulovat zvíře v ohrádce, domácí robotický vysavač nebo robotickou sekačku na trávu. Je omezen barevným pruhem, přes který nesmí přejet a uvnitř kterého bude plnit úkoly.
Postupně naprogramujte Ozobota pomocí OzoBlockly tak, aby plnil následující úkoly. Postupujte od prvního úkolu a postupně přidávejte další kousky kódu, po všech dílčích krocích budete mít hotový program.
- Ozobot jezdí po jednotlivých krocích (Ozo BIT), nebo danou rychlostí jednotlivých koleček (Ozo EVO). Robot tedy jezdí plynule bez zastavování (to dělá např. Evo, když mu zadáme příkaz „move forward 1 step“ – po každém kroku se zastaví.)
- Ozobot se zastaví na červené ohrádce (při detekci správné barvy podkladu).
- Místo zastavení v kroku 2 se Ozobot pootočí na červené ohrádce nějakým vhodným směrem a pokračuje v jízdě.
- Ozobot průběžně detekuje barvu podkladu a podle ní mění adekvátně barvu horního světla.
- Pokud Ozobot najede na černé pole označené jako „HOME“, usne zde na 5 sekund.
- Usnout v domečku (bod 5) si dovolí, až když se „napase“ se na zeleném políčku (při najetí na něj 2 sekundy počká).
- Usnout v domečku si dovolí, až když se „napase“ (bod 6) a „napije“ –analogicky jako bod 6 pro modré políčko.
- Toto vše dělá Ozobot opakovaně v nekonečném cyklu – tj. jezdí, respektuje červenou ohrádku, průběžně se pase a pije, občas napasený a napitý usne. Po probuzení opět jezdí… stále dokola.
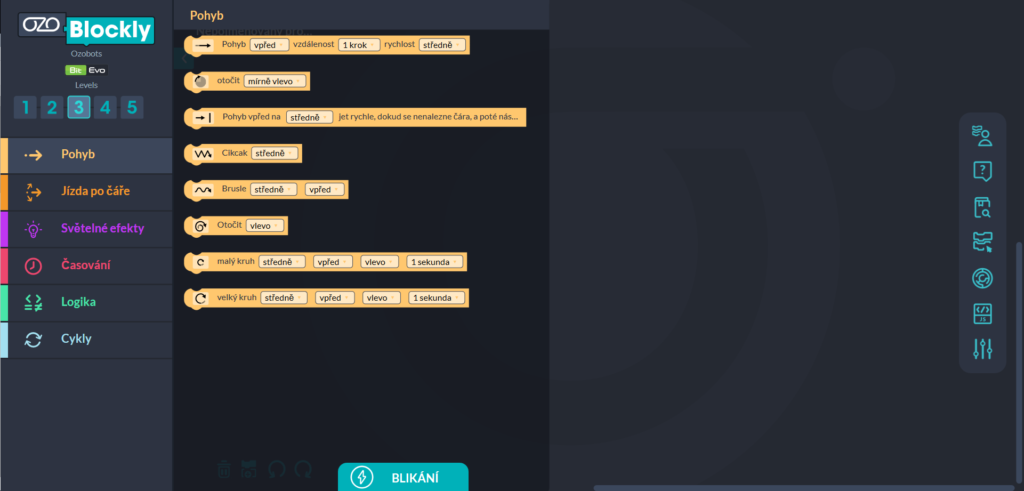
Pro sestavení programu využívejte správných příkazů pro daný typ robota (BIT / EVO) v OzoBlockly. Vyhýbejte se příkazům pro jízdu po čáře, zde pracuje pouze s podkladem.
V tomto programu nejsou nutné podprogramy, pokud nechcete například „pití“ a „pastvu“ robota simulovat např. blikáním.
Přidejte odpověď
Pro přidávání komentářů se musíte nejdříve přihlásit.